全國服務咨詢熱線:
15216837090
15216837090

電動助力轉向系統(Electric power steering,簡稱EPS)是世界汽車電子控制技術發展的研究熱點和前沿技術之一。國外汽車電動助力轉向已部分取代傳統液壓動力轉向(Hydraulic power steering,簡稱HPS)。目前國內清華大學、合肥工業大學等高校正從事該方面的研究,并取得了階段性的成果,爭取進一步改進與完善,早日實現商品化。EPS 通過對控制器軟件的設計,十分方便地調節系統的助力特性,使汽車能在不同車速下獲得不同的助力特性,以滿足不同的駕駛情況的需求。同時,EPS 用電動機直接提供助力,它能
節約燃料,提高主動安全性,有利于環保。
1、助力轉向系統的類型及EPS的基本控制策略
1.1 助力轉向系統的類型
(1)傳統液壓動力轉向
液壓動力轉向的控制閥采用滑閥式,即控制閥中的閥以軸向移動來控制油路。這種滑閥式控制結構簡單,生產工藝性好,操縱方便,宜于布置,使用性能較好。但是滑閥式控制閥靈敏度不夠高,后來逐漸被轉閥代替。
(2)電控液壓動力轉向
電控液壓動力轉向系統的種類很多,但其原理基本上都是通過在油泵或轉向器上加裝電子執行機構或輔助裝置,根據車速信號來控制液壓系統的流量或壓力。
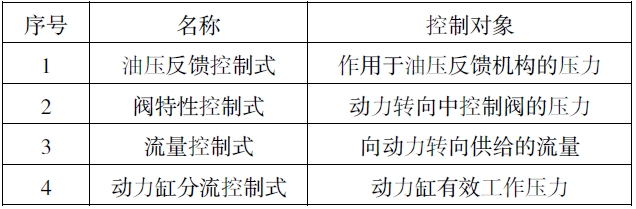
表1 電控液壓動力轉向系統的種類
(3)電動助力轉向系統(EPS)的工作原理
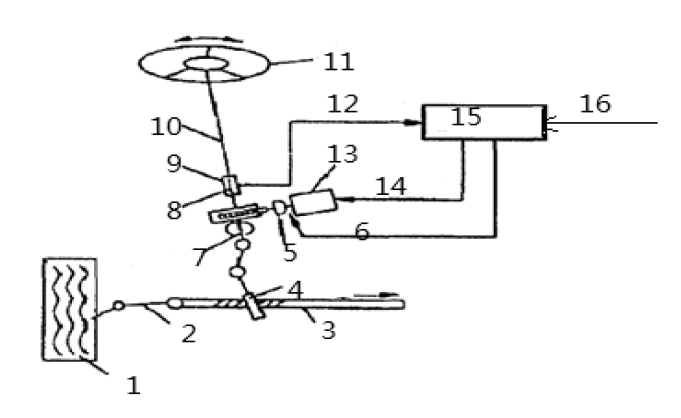
圖1 EPS的控制系統示意圖
1—車輪 2—拉桿 3—齒條 4—小齒輪 5—離合器 6—動力開關
7—輸出軸 8—扭桿 9—轉矩傳感器 10—輸入軸 11—方向盤
12—轉矩信號 13—電機 14—電流控制 15—控制單元 16—車速信號
電動助力轉向系統的基本組成包括:扭矩傳感器、車速傳感器、控制元件、電動機和減速機構等。圖1 所示為配用齒輪齒條式轉向器的EPS。信號控制器根據各傳感器的輸入信號確定助力扭矩的幅值和方向,并且直接控制電機。電機的輸出扭矩由減速齒輪放大,并通過萬向節、轉向器中的傳送裝置把輸出扭矩送到齒條,使之向轉向輪提供助推扭矩。
系統的信號源包括:扭矩傳感器、轉向角傳感器和車速傳感器,轉向角傳感器可根據齒條的位移量和位移的方向來測出轉向角。
(4)EPS 的關鍵部件
1.2 EPS 的控制原理圖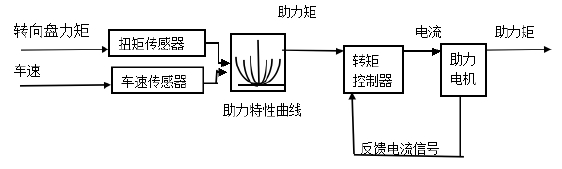
圖2 汽車EPS控制原理圖
EPS 主要部件包括傳感器、電動機、減速機構和電子控制單元等。
在掌握EPS 的工作原理前提下,將EPS 系統用框圖表示如下。
1.3 EPS 的基本控制策略
根據汽車轉向行駛的不同情況要求,EPS 按不同的控制方式進行控制,通常來說,對應汽車轉向行駛的不同情況有四種基本控制方式。
(1)普通控制
普通控制(助力控制)是EPS 的基本控制模式。其控制過程主要是:根據車速傳感器測得的車速信號和方向盤力矩傳感器測得的方向盤力矩信號,調用助力特性控制表,并根據電動機的電磁轉矩特性確定助力電流,以獲得適當的助力轉矩。
(2)回正控制策略
在方向盤“轉向回正”時,對EPS 進行的控制為回正控制,目的在于改善系統的回正性能。轉向時,前輪回正力矩使轉向輪向直線行駛的狀態變化。
回正控制的控制過程為:首先判斷方向盤是否處于“轉向回正”狀態,當助力電機旋轉方向和轉向輸入的旋轉方向相反,進行“轉向回正”控制,否則進行助力控制。
(3)阻尼控制策略
阻尼控制是EPS 為提高汽車高速直線行駛時的穩定性,減小路面沖擊對方向盤的影響而采用的一種控制模式。阻尼控制是在普通控制確定的目標電流之上補償阻尼控制電流,其主要是通過引入電動機轉速的方法來實現。
(4)補償控制策略
補償控制策略是根據轉向作用力的變化率沿力矩變化的方向產生補償力矩,來克服電機的慣量、阻尼和摩擦對電機輸出力矩的影響。補償力矩的大小由電機的慣量、阻尼和摩擦力的大小及電機的轉速、轉向加速度和轉動方向決定。
2、EPS仿真的初步研究及控制仿真驗證
2.1 理想助力特性
配備電動助力裝置的汽車轉向系統,應盡可能不悖于駕駛員原有的駕駛習慣,這樣駕駛員才能在轉向時得心應手。方向盤力矩與助力矩之間的理想關系應具備以下特點:
(1)在輸入轉向力矩很小的區域,希望助力部分的輸出越小越好,助力部分基本不起作用,以保持較好的路感。
(2)在常用的快速轉向行駛區間,為使轉向輕便,降低駕駛員勞動強度,助力部分發揮作用,助力效果要明顯。
(3)原地轉向時的轉向阻力矩很大,應盡可能產生較大的助力轉向效果,此時,助力矩增幅也應較大。
(4)隨著車速的升高,方向盤力矩減小時,不助力的區域應增大,且在高速行駛至一定車速時停止助力,以使駕駛員獲得良好的路感,保證行車安全。
(5)各區段過渡要平滑,避免操作力出現跳躍感,且助力矩不能大于同工況下無助力時的轉向驅動力矩。將上述特點與原則量化,可得理想的助力特性曲線。如圖3 所示,由于電動機輸出轉矩與電流間存在線性關系,因此該圖反映出助力矩隨行駛工況的變化規律,可以把它作為研究電動機控制規律的參照。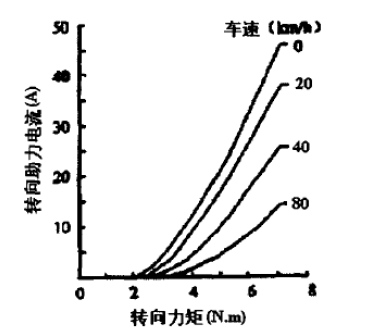
圖3 理想助力特性
2.2 控制系統的選擇
對助力電動機輸出轉矩的控制是EPS 研究的重點。由于電動機的輸出轉矩是由其工作電流決定的,因此助力控制可歸結為對電動機電流的控制(如圖4),其控制輸入為車速信號和方向盤扭矩信號。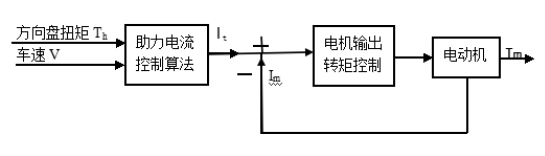
圖4 控制系統框圖
控制系統主要采用PID 控制系統。
PID 控制是zui早發展起來的控制策略之一,由于算法簡單、和可靠性高,被廣泛應用于過程控制和運動控制,尤其適用于可建立數學模型的確定性控制系統。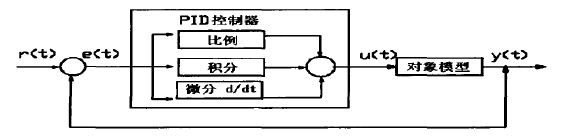
圖5 典型的PID控制結構
圖5 所示為典型的PID 控制系統結構。PID 控制器是由比例、積分和微分三個環節疊加構成的,各環節分別對誤差信號e(t)進行運算,其結果的加權和將構成系統的控制信號u(t)一并送給對象模型。PID 控制器的數學描述為: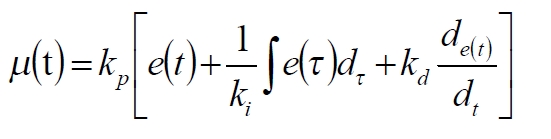
(公式1)
式中:kp—比例環節調整參數;
ki—積分環節調整參數;
kd—微分環節調整參數。
PID 控制器各環節所起的作用如下:
(1)比例環節抑止閉環系統的瞬態偏差信號e(r),通過增加kp值還可加快系統響應速度,提高閉環響應的幅值。但kp值不能無限制增加,對于不同的閉環控制系統kp的取值范圍不同,超出該限制范圍,系統將不穩定;
(2)積分環節主要用于消除系統的靜差,提高系統的無差度。積分作用的強弱取決于積分的時間常數K;K 越大積分作用越弱,反之則越強。而過強的積分作用使系統的超調量增加,系統的穩定性變壞;
(3)微分環節能反映偏差信號的變化趨勢(變化速率),并能在偏差信號值變大之前,在系統中引入一個有效的早期修正信號,從而加快系統的動作速度,減少調節時間。其不足之處是放大了噪音信號。
電話
微信掃一掃

 當前位置:
當前位置: